
Cubli :-
A combination of two words, Cube – an English word & li- an Swiss German diminutive word meaning ”small”. Researchers from the ETH Zurich’s Institute for Dynamic Systems and Control have developed the Cubli, a 15x15x15 cm device that can walk, jump, and balance itself on its edge or even on a corner.
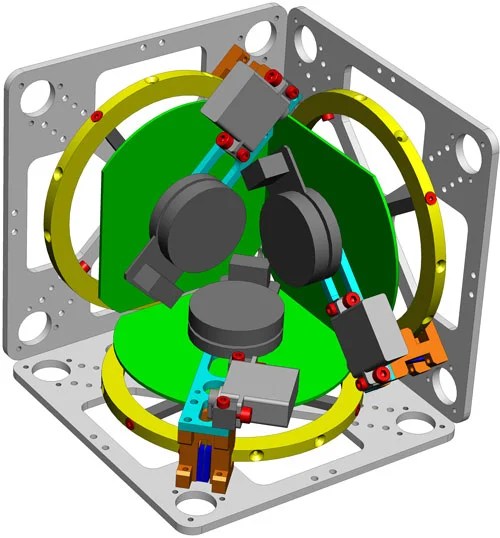
Researchers said that balancing was not a big issue for The Cubli, while the problem was jumping up from the rest position because at that instant, it needed more energy so they used reaction wheels mounted on three faces of the cube which rotated at high angular velocities & then brake suddenly which caused cubli to jump.
Once the cube stood up on a corner, controlled motor torques were applied to balance on one point.
In addition to balancing, motor torques were also used for a controlled fall in any direction.
Combining these things – jumping up, balancing, and controlled falling — the Cubli is able to walk on its own !
source:- www.robohub.org