In my previous article we saw about how trains turn on curved tracks. Well in automobiles, we can’t use the same principle for turning around a corner as our cars don’t run on tracks. So we cannot design our tires as the train wheels. At the beginning of auto industry, only one rear wheel was driven by the engine. But if only one wheel was driven by the engine, it had to all the work & also it couldn’t maintain a good grip on the road.
So if we drive or supply power to both the wheels, the outer wheel had to cover more distance than the inner one while taking a turn. This is why we need differential – to drive both the wheels at different speeds!
Construction of differential :-
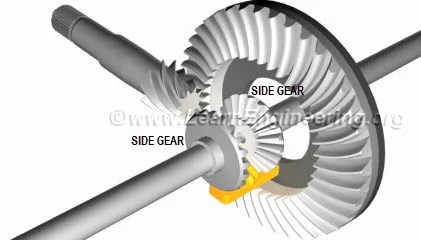
The standard differential mainly consists of 3 parts –
1. The pinion gear
2. The ring gear &
3. The spider gear

The pinion gear transfers the power from engine to the ring gear.The spider gear lies at the inner edge of the ring gear.The spider gear is free to rotate on 2 axes-
1. along with the rotation of ring gear &
2. on its own axis(spin)
Also the spider gear is connected to two more side gears.
Working of Differential :-
So, first the power is transferred from engine’s drive shaft to pinion gear, since the pinion gear & ring gear are meshed, power flows to ring gear.As the spider gear is connected with the ring gear, power flows to it. Finally from the spider gear, power gets transferred to both the side gears.
–When the vehicle moves straight, the spider gear doesn’t spin & will make BOTH the side gears rotate at same speed.
–When the vehicle moves on a curve road, the spider gear itself spins & either of the side gears move slower or faster than other one.Which will be faster & which will be slower is decided by the turn.
Make sure you watch the video. I assure you a 100% guarantee of understanding the whole thing.
Here is a demonstration in the most simplest way ever possible…!
you can jump to 1:56 if you want to skip the boring part.
[Source]
Limited Slip Differential –
Limited Slip Differentials or LSDs are the most modern and complicated type differentials used today in automobiles.
The biggest disadvantage of ordinary differential is when a slip condition occurs only on one wheel. The differential transmits all the power to the one which has the least resistance. This wastes too much power. Along with that, it doesn’t help the car get out of the slip condition. This is where LSDs come into action.

Limited slip differential limits the amount of torque or power transmission on one wheel and transmits it to the other wheel. This is done via adding a pre-loaded spring or clutch packs.
Types of Limited slip differentials –
- Fixed value
- Torque sensitive
- Speed sensitive &
- Electronically controlled
Suggested article for auto enthusiasts –
What is clutch? Why do we need it? Working and types with animation !