So you wanna build a robot which never hits anything; you’ve come to the right place! It barely takes 15 minutes to do this! So without wasting our time let’s learn how to make an obstacle avoiding robot!
If you are an auto enthusiast or even NFS lover you definitely have heard about them ! We also know that they increase the power of the vehicle but, which is better, how do they work & what are the differences between superchargers vs turbochargers ? Lets dive right in.
Many of your corporation’s important and useful documents (whether they are policy documents, client information documents, partner or vendor agreements, new employee onboarding documents, eBooks or others) are stored in PDF format. This allows your company to distribute them to authorized users in a standard format that cannot be modified.
However, many such documents are confidential and you would not want them to be shared with unauthorized users. The best way to ensure this is by exercising licensing controls and restrictions on your PDF files through some reliable PDF security software that contains a host of built-in security features.
The objective of using such a PDF security tool is not just to stop unauthorized sharing and ensure secure file distribution, but also to control the use of PDF files and the duration for which they are used by the authorized users. So, below is a discussion of the top PDF security software features for foolproof PDF protection.
Highly Protected Encryption Keys to Prevent PDF Sharing
Password protected PDF files are no longer secure as the passwords can easily be shared with others or, perhaps, someone can remove them altogether. However, PDF software can now use individual encryption keys that are passed on to the relevant authorized devices from a web server in a highly secure manner. Such encrypted keys are stored in a keystore which is locked and specific to individual devices so that it cannot be duplicated or moved to another device.
So, when any employee, partner or similar authorized person tries to open an encrypted PDF file, the PDF viewer software (as part of the PDF security solution) will check with the admin server if that person is authorized to do, and if they are obtain the necessary decryption key without exposing this to the user.
No “Save” Functionality to Avoid Unauthorized Copying
Allowing your PDF files to be saved by using a “Save” or “Save As” option can result in them being copied into unprotected formats that enable unauthorized sharing or editing. A good PDF security software will not include any “save” option in their PDF viewer, instead of using JavaScript to disable any “save option” as JavaScript can easily be manipulated and removed. This means that your PDF files cannot be converted into any unprotected file formats, such as MS Word.
Even if someone tries to use a third-party tool to convert the PDF file into another file format, the encryption keys will ensure that only authorized users will be able to view it.
Not Relying on Adobe Acrobat’s Permissions Password to Safeguard PDF Content
Your PDF security solution can stop any kind of PDF editing or modification by default, instead of relying on the Adobe Acrobat security feature of “permissions password” that enables you to prevent any PDF editing, printing or saving. This is because the “permissions password” can easily be removed through the use of PDF password remover tools available online.
Even without any editing rights, it may be possible for your PDF document users to highlight particular text and copy and paste them. The PDF security software also ensures there is no way that the content of your PDF files can be copied and pasted by not providing any option to highlight the PDF text.
Preventing Screenshots by Using Screen Mask
Your PDF security software can use a screen mask to ensure that no third-party screen grabbers can make screenshots, in addition to disabling the “Windows print-screen” option. Also, dynamic watermarks with individual user identification can be used to ensure that no one can take a photograph and upload the content, claiming it as their own.
There are numerous other features of a PDF security tool that can ensure foolproof protection of your PDF documents. Feel free to share your views or feedback in the comments section below 😀
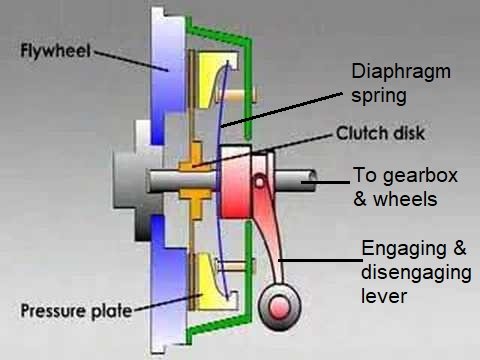
When I was a kid, I always used to think, is there a need of clutch ? what does it do exactly ? & as a kid I was able to imagine the working of brakes & how does the speed increase but I was never able to understand clutches ! It was truly a satisfying moment for me when I was completely able to understand clutches. So here it is, today we’ll see everything you need to know about Clutches !
Additive manufacturing – commonly referred to as 3D printing – is the process of creating a solid three dimensional physical object from a digital file or design.
A 3D printed infinte path loop with a ball inside it
Unlike traditional manufacturing methods where material is removed from a solid block, 3D printing technologies build products layer-by-layer, only adding material where it is needed. A variety of 3D Printing technologies enable a wide range of materials to be processed, including polymers, resin, plastic, paper, wax, sandstone, metals, ceramics and bio-materials.
First commercialised in the late 1980s, additive manufacturing technology initially found widespread usage in producing prototypes and tooling; but is also being applied across various engineering industries, architecture & medical sector !
About TIME TO 3D :-
Time To 3D is India’s first-of-its-kind 3D printing hub located at Mumbai. While 3D printing technology has been around for three decades, it has mainly been restricted to industrial and B2B(business to business) applications. Founder Mr. Rahul Shah sensed the need to bring this technology to direct consumers, and to bridge the gap between technological advancement and public awareness. As a result, Time To 3D was founded with the aim of creating a platform to increase awareness on 3D printing and to engage directly with consumers. This initiative is a partnership between Imaginarium (India’s largest 3D printing company) and the Time Media Group. You will find state of the art equipment at the hub that can cater to both consumers and industries.
Highlights at the hub :-
3D printing services –
Customers have a choice of bringing in their own 3D digital file or download one free from the internet.
You can choose from a range of novelty customized products.
3D selfies :- Yes, you heard it right, 3D selfies ! First, you’ve to visit the hub to get scanned by their structure sensor linked with iPad. The sensor then converts the scanned file into a 3D model file & is then uploaded to the 3D printer. Voila, you’re done ! Now let the printer do rest of the job !
3D printing offerings :- Using latest 3D printers and software, consumers can 3D print any household item or even a school/college project in a wide range of materials. Also Time To 3D caters to clientele in the fields of jewellery, engineering, aerospace, architecture, medical, dental, fashion, interior design, automobile, prototyping, manufacturing, education, casting/moulding, entertainment and many more.
This slideshow requires JavaScript.
Doodle Pen Sessions –
Compact and easy to use 3D doodle pens extrudes heated plastic that cools down immediately to form a solid object. The hub offers hands on 3D doodle pen sessions for 30 minutes, 60 minutes and 90 minutes.
Workshops/Courses –
Regular workshops and courses are conducted at the hub that are designed for anyone of any age in any field where no prior knowledge of 3D printing is required.
Birthday Parties –
At Time To 3D, a combination of fun and learning is served to young consumers. Birthdays parties are organized in a manner that children enjoy themselves while learning. Party activities include an introduction to 3D printing, hands on scanning and doodling sessions.
Other offerings –
True to their word of being a one stop shop for 3D printing, the hub also offers 3D printers, 3D doodle pens and 3D filaments for customers to purchase directly. Unlike any other platform, consumers have the opportunity to walk in and experience 3D printers and doodle pens first hand before making a purchase.
My personal experience at the hub –
You feel that you’ve entered into an entirely world the moment you enter into the hub ! There were tons of products at the display & it was hard to believe that every one of them was 3D printed ! Then they showed variety of products they manufacture. The products included from engineering sectors such as gears & exhaust manifold, buildings, medical sectors & other show-pieces which I wasn’t able to take my eyes off !
After that, I had my eyes on a little miniature Einstein. The detailing on the miniature model was unbelievably marvelous ! They didn’t fail to notice my curious mind & showed me how these types of miniature models & selfies are manufactured with their modern tech ! They also let me have a hands-on session on 3D doodle pens 😀
They handed me a goodie bag too at the end of the event ! It contained small 3D printed keychain, mobile holder & other stuff ! I recommend that you should at least visit the hub once & believe me you would like to have every one of them once you lay your eyes on them !
Time to 3D is located at Vile Parle, Mumbai; just 500m away from Vile Parle station ! If you want to dig up more information or shoot any enquiries, visit their website !
Today, selling & buying used cars is multi billion dollar business industry ! A new competitor has entered into this industry & is redefining the way cars are being sold & bought in India. The competitor – CARS24 ensures car owners a simple and reliable way of selling their cars at the best price.
About Cars24 :-
The CEO & COO of CARS24
Founded by Mr Vikram Chopra and Mr Mehul Agrawal in 2015, today, CARS24 has 52 branches across 11 cities in India with bench strength of more than 600 employees. CARS24 has since auctioned 1 lakh plus cars through its network, spanning across thousands of authorized buyers in India.
Why CARS24 ?
Typically, it takes a car owner around 30-50 attempts to sell his/her car. The process involves listing the car on various websites, taking numerous calls, meeting multiple buyers, facing last-minute buyer back offs, delayed payments and an endless wait for the ownership transfer. Even after all this, there is no guarantee that one will get a fair price for his/her car. more “CARS24 creates an efficient & reliable way for car owners to sell their used cars at best price !”
At first, I had a notion that it must be such a difficult job – controlling things just by giving voice commands ! Uhh… it seemed that only the experts & nerds could do it ! But believe me, this turned out to be one of the easiest things I’ve come across related to Arduino. So without wasting our time lets know how to control LEDs with voice commands with this Arduino-Bluetooth module tutorial ! more “Control LEDs with Voice Command | Arduino-Bluetooth module tutorial”