Does everything remain normal ? I guess NO. Fighter jets are specially designed for that – powerful weapons, missiles & high speed. So here we will talk about what happens when an aircraft travels more than the speed of sound or breaks the sound barrier ! more “What happens when an aircraft travels more than the speed of sound ?”
The name itself gives us an idea that it is invented by Archimedes. Now this man – Archimedes, was an Ancient Greek mathematician, engineer, inventor, physicist, & an astronomer(such a smartass). We are living in 21st century & still we are not able to think stuff like this on our own & this man did it in the 3rd century BC !!!!!
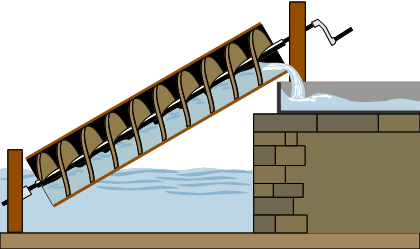
We already discussed one of his works – buoyancy & we sawhow do ships float ? So the Archimedean screw OR screw pump is just a simple machine consisting a cylinder & a helical surface on the inside part of cylinder. Basically, it was designed to work like a pump & it worked without any of our presently available motors which we use to run todays pumps. The screw was used mostly for draining water out of mines or other areas of low lying water.
Animation of the Archimedean screw. Let us assume that the ball is a water molecule.
Construction :- The screw pump consists of a screw or a helical structure inside a hollow pipe. The screw is turned through a handle which is outside the cylinder. As the shaft turns, the bottom end scoops up a volume of water. The water then gets pushed out up by the rotating helicoid until it pours out from the top of the tube & done just so simple.
Applications OR Uses :- Why it was made ? – the first purpose was to transfer the water from low lying region to other parts of the city. Along with transferring water to irrigation ditches, the device was also used for draining land that was underneath the sea in the Netherlands and other places in the creation of polders.
A screw conveyor :- It is an Archimedean screw contained in a tube & turned by a motor so as to deliver material from one end to other end. It is particularly used for transporting granular materials such as plastic granules used in injection molding and cereal grains.
Conveyor Screw (source :- ibis-int.co.uk)
Screw turbine :- If water is poured into the top of Archimedes’s screw, it forces the screw to rotate. The rotating shaft can then be used to drive an electric generator.
Worm gear :-
This is actually not an application of the Archimedean screw but yea it might be an inspiration to the one who designed & invented the worm-gear mechanism.It is awesome & I really love it. Remove the outer cylinder of the Archimedes’s screw, mesh a gear of proper tooth thickness with the screw & we are done. Here the screw thing is called worm. Now the reason I love it is because the worm will definitely drive the gear but the gear may or may not drive the worm depending on the design of worm.
(It’s like if you close your door/gate of your house with help of worm gear mechanism, only you would be able to open & close it from inside because only you would be able to rotate the worm. Don’t ever worry about burglars unless & until the gate/door is big enough & not made of wood ! 😛 )
Imagine you are on-board a ship & what would be the worst thing that would happen to you ? – the water flooding inside the ship making it sink to the seabed…damn…! So we need something which ensures either it doesn’t sink OR even after sinking, all be safe. So in simple words – a Submarine is a vehicle which allows us to travel on water as well as deep inside the seas & oceans. Also a submarine is used in military for protection purposes. more “How does a submarine work ?”
It’s big… no it’s bigger… sorry it’s the BIGGEST truck in the world ! Whenever I see it, it gives me a feeling like the truck is trying to say me – GET THE HELL OUT OF MY WAY !!! You probably enjoyed the childhood by making the construction scenes, playing with the trucks making sounds – Vroom broom…! Our favorite among the collection of toys were the backhoe loader(well known as JCB) & the dump truck because they were different from others. We love to fill the bed with mud, rocks & made mechanical voices while dumping it.
In real world dump trucks are used to haul loads of rocks, dirt, sand, coal etc. And obviously the more a dump truck can carry, the less it costs the mining company per load to haul the resources. For several years the largest dump truck was the Caterpillar 797B.
Caterpillar 797B (source: flickr.com)
This massive beast was so big that it couldn’t be driven even on a highway. Instead it had to be transported in pieces & assembled at the construction site. Unbelievable, isn’t it ?
But, human nature – “never satisfies”. So the title of largest dump truck went to a new vehicle – The mighty BelAZ 75710.
Now this thing is really really at the edge of massive-ness. It is manufactured by BelAZ in Belarus. So how big is it ?
If u stand beside it, you would barely reach to the center of it’s tires or in a better way – the radius of tire is greater than your height ! Each tire costs $42,000 which also explains why this entire shit costs over $6 million !
It is as long as two buses parked end to end & believe me – it is more heavy than Airbus A380 – the world’s largest passenger airliner ! It is 20.6 metres long, 8.16 metres high, and 9.87 metres wide. The empty weight is 360 tons & it can carry 450 tons of load !
Instead of a single engine, the Siemens MMT 500 drive system is powered by two 65-litre 16-cylinder diesel engines, each with 2300 horsepower. 2 engines working together give a power of 4,600 hp – 4.6 times than the Bugatti Veyron Super Sport, the fastest car in the world !
[espro-slider id=223]
Now, if you are wondering why BelAZ chose electric motors to drive this thing; the company wanted to maximise fuel efficiency while also meeting tougher environmental regulations that govern vehicle emissions related to mining operations.
Now this is the first time I have used the exclamation marks so frequently – almost after every line. Well it had to be done. Yea, you know it expresses the feelings ! So once more… All hail mighty BelAZ 75710 !!!
Thinking to walk on water ? – really bad idea. Why cant we walk on water ? Why does not everything float ? Why doesn’t a stone or any other thing float even if they are are very small ? & HOW DO SHIPS FLOAT BEING SO HEAVY ?more “How do ships float ?”