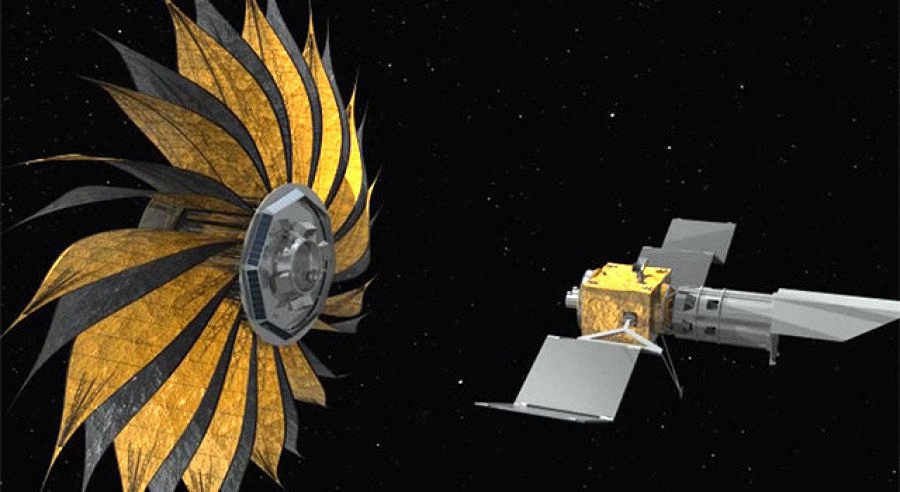
I mean seriously what do these engineers & scientists at NASA are made of ? I know they’re made of atoms but still.. I mean how do they come up with such awesome cool stuff every time ! This time, it’s something you would not have even thought of. Yea… we are talking about NASA’s Starshade mission! (watch the video below) more “NASA’s Starshade to help find another Earth !”
Designing a car & making it is not as easy as sitting & watching a movie on a couch. Making a car doesn’t just mean to join the parts we bought; it needs to have deep knowledge of thermodynamics, fluid mechanics, dynamics & must also be able to do calculations which fits the rules & which doesn’t damage the car. One cannot do this being a book worm; it requires lot of creativity, ‘engineering expertise and motor racing skills. Team Ashwa has proved that they have all these qualities.
While the students in BCom colleges in Bangalore were having fun, some engineering students – the Ashwa team of RV college of Engineering; were working hard to make their super car.
Ashwa Racing is India’s premier Formula SAE (FSAE) team. The FSAE (Formula Society of Engineers) event is one in which SAE student members conceive, design, fabricate and compete with other similar formula-style student racing cars in a race organized by SAEin a different country every year.
R S Kulkarni who advises the team says:
The team is the number one formula racing university team in the country. It competes with teams from US and Europe who have vast financial and other resources at their disposal. We have to work with what we can afford. They are also competing against teams which have more than two decades experience in automotive racing. Yet the team has bagged the best Asian team award and is in the top rankings
FSAE India. The event is also called as SUPRA SAEINDIA ! source:- http://edu.autosportsindia.com/
The body of the car is made from glass fibre. Also the engine is taken from an crashed bike to reduce the expenses. They say that the engine capacity is 600 cc & can hit a top speed of 100 km/hr or a few more. It cost them around 15 lakh Rs to make it. Total 7 prototypes were made; the last one made in 2011.
Kulkarni says that this amount may seem high at first, but when compared to foreign teams who spend around whooping Rs 2 crore to design and build their own cars. “One thing we have been appreciated for is the cost-effectiveness of our car and yet its very good performance.”
The car model name was earlier RVIANZ, to commemorate student life at RVCE. Later, it was shortened to RZ.
Ashwa team has been participating in the competitions of FSAE since 2005. This is because they completed their first prototype(out of 7, as I mentioned earlier) in 2005. They participated in the competition in 2005 & 2006 in Australia followed by 2007 & 2008 in Germany & 2009-10 in Italy.
The team’s last prototype, RZ X, successfully completed the Formula ATA Italy event in 2010 winning The Best Asian Team award.
If anyone is wondering – why the word Ashwa ? what does it mean ? Well, I should tell you that Sanskrit is most ancient & philosophical language of India. According to Sanskrit, Ashwa means Stallion. Hence, the name was chosen for the team.
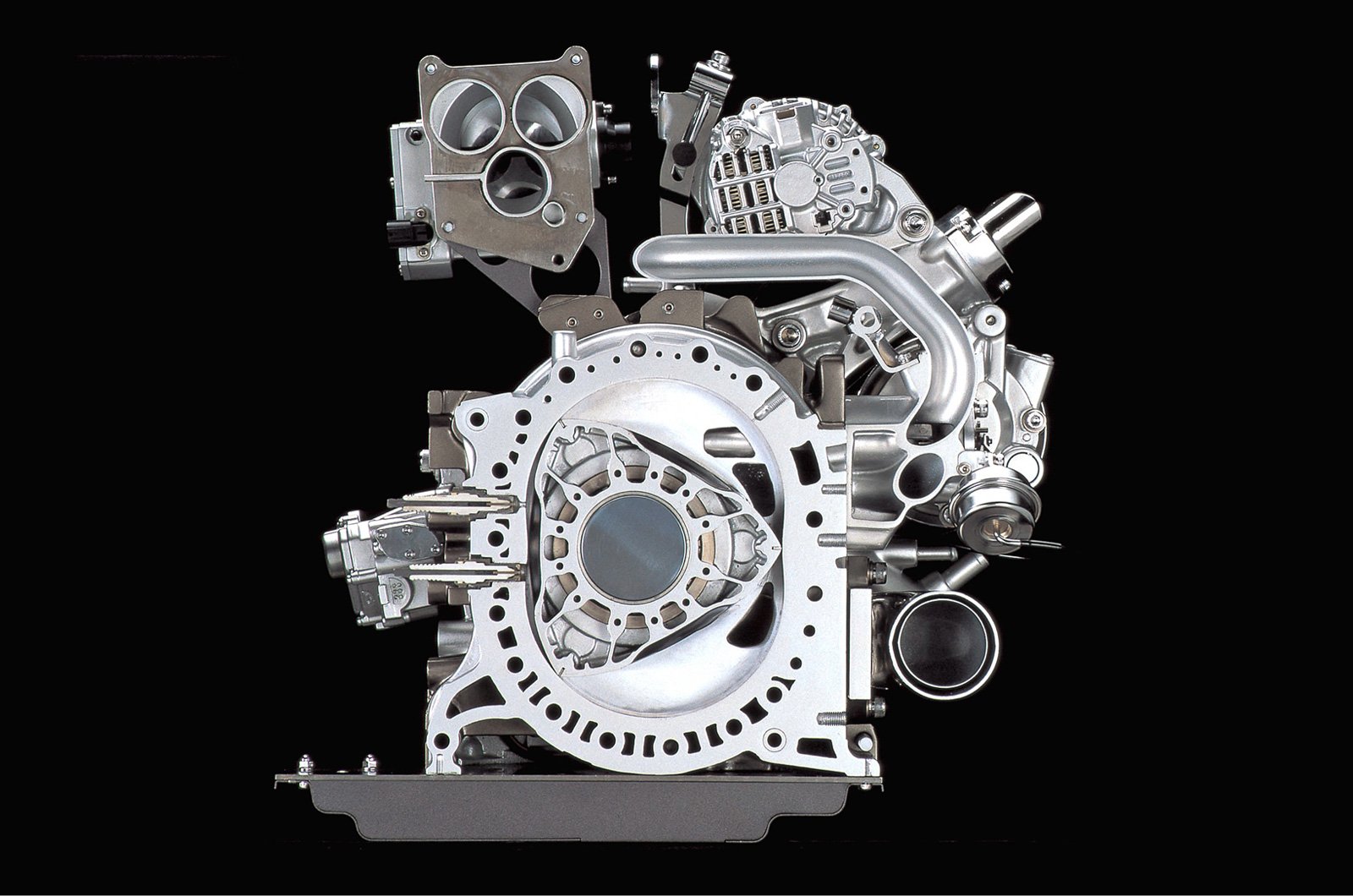
No more boring introductions, lets get started & understand how does a Wankel engine work & what exactly it is !
History :- The first Wankel engine was developed by German engineer – Felix Wankel. Wankel received his first patent for the engine in 1929. more “How does a Wankel engine work ?”
We Humans, being a couple of feet high, weighing barely a quintal are capable of making & building things million times bigger & heavier than us & we have proved it. Hats off to those engineers who have built them ! So lets have a look at the top 10 biggest machines of all time which we’ve never imagined of !
These are the machines which are so big that you might have to walk a kilometre or so to view them completely. So get ready to get your jaw drop…! The countdown begins… more “The Top 10 Biggest Machines in the World !”
Rotary/gnome engines were used to power aircrafts during WW-I & radial engines during WW-II. Then came the era of jet engines which completely revolutionized the aviation technology ! Jet engines were very much efficient & powerful than those used during World wars ! The power jet engines deliver is so high that an airplane weighing hundreds of tons lifts off the ground with such ease. How are they capable of producing so much of power/thrust ? So lets not waste our time & have a look on how do jet engines work ?more “How do Gas turbines or Jet engines work ?”
Human being started using animals to carry load when it exceeded his carrying capacity. Then he started building machines to carry even more load & to transport faster. Today huge trucks carry massive amounts of load & the best example is the biggest truck in the world – The BelAZ 75710 which can carry 450 tons of dirt. Still, there was something left, something to be made to carry these massive rockets & space shuttles. So how are they transported ? The answer is – CRAWLER a true engineering marvel ! more “Crawler – The Rocket Transport !”
Earlier in the Engines section we saw how 4 stroke & 2 stroke engines work ! We might like to give a thought on which is better one OR which has more advantages. So in this article we are going to discuss about the differences, advantages & disadvantages of 4 stroke & 2 stroke engine. more “Differences, Advantages & Disadvantages of 4 stroke vs 2 stroke engine”